Curiosity মার্স রোভার (95 মিলিয়ন কিলোমিটার দূরের মঙ্গলে মানবজাতির প্রতিনিধি)
এই শীতের বিকালে যখন আপনি আমি যখন কম্বলের নিচে গুটিসুটি হয়ে শুয়ে আছি তখন ঠিক আমাদের পৃথিবী থেকে 95 মিলিয়ন কিলোমিটার দূরের মঙ্গল গ্রহে একটি যন্ত্র মানবজাতির প্রতিনিধি হিসাবে মঙ্গলে বসবাস করছে। 1997 সালের 4 ই জুলাই থেকে শুরু করে আজ ২০২০ সালে মঙ্গলে মানবজাতির প্রতিনিধি হিসাবে রোভার ছিল এবং আছে।এখন পর্যন্ত ৬ টা রোভার মঙ্গলে পাঠানো হয়েছে যার মধ্যে একটা মাত্র সচল আছে। তবে কিছুদিনের মধ্যে সেখানে আরেকটি রোভার নিক্ষেপনের প্লানিং চলছে।
চিত্রঃ মার্স রোভারের মডেল।
অনেক আগ থেকেই মঙ্গলের মানবজাতি তাদের দ্বিতীয় বসতি স্থাপন করার জন্য চেষ্টা করছে। কিন্তু বললেই তো আর কোন গ্রহে মানব বসতি স্থাপন করা সম্ভব না। আগে সে গ্রহটি সম্পর্কে বিস্তারিত জানতে হয় জানতে হয় । সেখানে পর্যাপ্ত পরিমাণ অক্সিজেন আছে কিনা, পানি আছে কিনা বা বেঁচে থাকার জন্য যে আবশ্যকীয় উপাদানগুলো দরকার সেগুলো আছে কিনা । এগুলো জানার জন্য সরাসরি স্যাম্পল ও খুব কাছ থেকে ছবি দেখা দরকার হয়। তাই মানুষ এসব তথ্য সংগ্রহ করার জন্য ও বিস্তারিত জানতে মঙ্গলে রোবোট পাঠানোর সিদ্ধাত নেয়। নাসা ১৯৯৭ সালের জুনে প্রথম রোভার উৎক্ষেপণ করে যার নাম Sojourner rover । এরআগেও ১৯৭১ সালে চীন ২ টা রোভার মঙ্গলে পাঠায় যা সফলভাবে ল্যান্ডীং করলেও কিছুক্ষণের মধ্যেই পৃথিবীর সাথে কমিউনিকেশন হারায়। Sojourner rover প্রায় ২ মাস একটিভ ছিল বিধায় আমেরিকার এই প্রোজেক্টটিকে প্রথম সফল রোভার উৎক্ষেপণ প্রোজেক্ট বলা হয়।

চিত্র ২ঃ ৬ টা মার্স রোভারের কার্টুন চিত্র।
৬ টা মার্স রোভারের নাম ছিল মার্স ২(চীন) , মার্স ৩( চীন) , Sojourner rover( আমেরিকা) , স্প্রিন্ট( আমেরিকা) , অপারচুনিটি(আমেরিকা) , কিউরিওসিটি(আমেরিকা)। এদের মধ্যে কিউরিওসিটি এখনো একটিভ। এটাই বর্তমানে মঙ্গলে মানজাতীর একমাত্র সচল প্রতিনিধি। চিত্র ৩ এ এদের দ্বারা অতিক্রান্ত দূরত্ব নিয়ে জানতে পারবেন।

চিত্র ৩ঃ মার্স রোভারদের দ্বারা অতিক্রান্ত দূরত্ব।
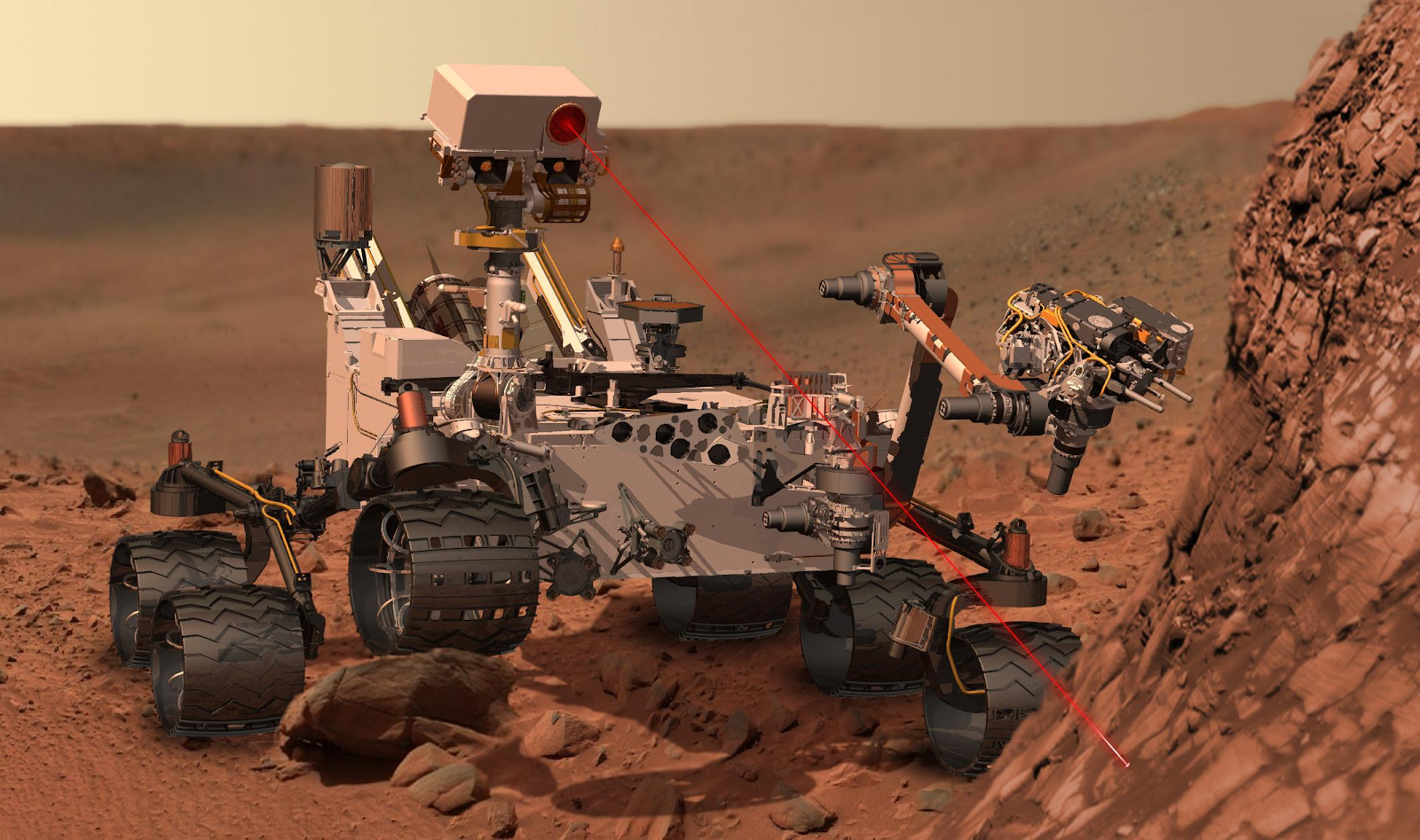
আজকে আমরা আলোচনা করব সচল মার্স রোভারটি নিয়ে। কিউরিওসিটি।

চিত্র ৪ঃ কিউরিওসিটি রোভার
মঙ্গলে রোবট পাঠাতে আমাদেরকে কম চ্যালেঞ্জের মুখোমুখি হতে হয়নি। প্রথমে যে সমস্যার মুখোমুখি আমরা হই সেটা হচ্ছে রেডিয়েশন প্রবলেম । মঙ্গলের রেডিয়েশন এর পরিমাণ এত বেশি যে সেখানে নরমাল কোন কম্পিউটারের সার্কিট কাজ করে না । পৃথিবীর কোন সাধারণ কম্পিউটার বা যন্ত্র সেখানে পাঠালে কম্পিউটারটির সার্কিট নষ্ট হয়ে যায় অর্থাৎ অকেজো হয়ে যায় । এর সময় এই সমস্যাটার সমাধানে বিজ্ঞানীরা ভাবলেন কম্পিউটারটির সার্কিট ও কম্পিউটার বডি এমন পদার্থ দিয়ে তৈরি করবেন যাতে তা তেজক্রিয়তা দীর্ঘক্ষন সহ্য করতে পারে । সেজন্য অপধাতু/সেমিকন্ডাকটার ব্যবহার করতে হল তা হচ্ছে বোরন। তবে এটা খুব ব্যয়বহুল হলো কারণ প্রতিটি সার্কিট বোর্ড এর জন্য দুইহাজার ডলার করে খরচ করতে হলো। এই পাওয়ার কম্পিউটারকে বলে Rover Compute Element অথবা RPC ।
এখন একটা বিষয় নিয়ে কথা বলব সেটা হচ্ছে রোভারের চাকা। আচ্ছা কখনো কোনো রোভার দেখেছেন? খেয়াল করে দেখবেন এদের চাকা কিন্তু মসৃণ না । খাজকাটা খাজকাটা এবং অদ্ভুত সব ডিজাইন করা। আমাদের কিউরিওসিটি এর চাকার ও ডিজাইন করা এভাবে। কেন এভাবে ডিজাইন করা হয়? কারণ হচ্ছে এদের চলাচলের পথ ট্রাক করার জন্য। একে বলে odomity।

চিত্র ৫ঃ কিউরিওসিটি রোভারের চাকা।
কিউরিওসিটির চাকা চিত্র ৫ এর মত। সোর্স কোড দ্বারা ইংরেজি লেটারে J P L লেখা। এটা হল Jet Propulsion Laboratory এর শর্ট ফর্ম। এই JPL ল্যাবেই কিউরিওসিটি মার্স রোভারের তৈরি হয়। যখন মঙ্গলে সে চলাচল করে, তখন বালুতে ছাপ রেখে যায়। এই ছাপ দেখেই তার চলার পথ সম্পর্কে জানা যায় ও সে কোথায় আছে সেটা সম্পর্কে নিশ্চিত হওয়া যায়।
কিভাবে আমরা রোভারের সাথে পৃথিবীতে সম্পর্ক রাখি?? আসলে এই কানেকশন কিন্তু অনেক গুরত্বপূর্ন একটা বিষয়। আমাদের ১ম ২ টা রোভার মার্স২ ও মার্স ৩ মঙ্গলে ল্যান্ড করার পর পৃথিবীর সাথে কানেকশন হারানোর কারণেই কিন্তু মিশন সফল হয়নি।
তো আমরা দুই ভাবে রোভারের সাথে কানেকশন রেখে থাকি । একটা ডিরেক্ট কানেকশন, মানে রোভার আমাদের তার এন্টেনা দিয়ে আমাদের(পৃথিবীতে) রেডিও ফ্রিকুয়েন্সিতে তথ্য পাঠায় আর আমরা আমাদের পৃথিবীর এন্টেনা দিয়ে তা রিসিভ করি। কিন্তু এই পদ্ধতিতে তথ্য খুব বেশি পাঠানো যায় না, আর পাঠালেও তা আসতে অনেক সময় লাগে। এজন্য ২য় পদ্ধতি অর্থাৎ পৃথিবী ও রোভারের মধ্যে ৩য় মাধ্যম ব্যাবহার করা হয়।
মঙ্গলের চারপাশে আমাদের কিছু এন্টেনা আছে মঙ্গল পর্যবেক্ষণের জন্য যাদের অরবিটর বলে। এরা আমাদের ৩য় মাধ্যম হিসাবে কাজ করে, ফলে তথ্য প্রথমে রোভার থেকে অরবিটরে যায়, সেখান থেকে পৃথিবীতে আসে। ফলে আমরা রোভার থেকে বেশ অনেক তথ্য পেয়ে থাকি।
মার্স রোভারের ১৭ টা ক্যামেরা আর ১ টা টেলিস্কোপ আছে । এটার আর্ম বা হাত একটা। তাই ১৮ টা ক্যামেরার কয়েকটা দিয়ে সে মার্সের ছবি তোলে, বাকি ক্যামেরা গুলো দিয়ে সে নিজের চলাচলের পথ ঠিক রাখে। যেমন চাকার উপরে ক্যামেরা থাকে যাতে সে কোন পাথরের উপর দিয়ে না চলে যায়। সামনের ক্যামেরাটা চোখের মত কাজ করে। তার সামনে কি আছে, সেগুলোর সিদ্ধান্ত নেয়। এসব নির্দেশ পৃথিবী থেকে তার মধ্যে প্রোগ্রাম করে দেয়া হয়েছে।
রোভারের একটা গুরত্বপূর্ন অংশ হচ্ছে SAM । পূর্নরূপ Sample Analysis at Mars । আমরা তো ছবি দেখে সব কিছু জানতে পারি না, পদার্থের স্যাম্পল ও বিশ্লেষণ করতে হয়। এজন্য এই অংশটা দারুন কাজ করে। এটাকে মুখের সাথে তুলনা করা যেতে পারে।
এটা ছোট ছোট নুড়ি পাথর খেয়ে চুর্ন করে বালুর প্যালোটের মতো করে ফেলে। এরপর এই স্যাম্পল পরীক্ষা করে বের করে এখানে কি কি পদার্থ আছে, কি ধরনের গ্যাস আছে, পানির উপস্থিতি আছে কি না ইত্যাদি ইত্যাদি। এসব তথ্য পরবর্তিতে সে পৃথিবীতে পাঠায়।
এভাবেই কিউরিওসিটি রোভার কাজ করে। আগের রোভারগুলোর কার্যপদ্ধতিও মোটামুটি একই ধরনের ছিল। এই রোভারগুলো মঙ্গলে আমাদের মানব জাতির প্রতিনিধি । হয়তোবা কয়েক দশক বা শতাব্দি পরে মঙ্গলে আমাদের বসতি হবে। তখন আমাদের মনে রাখতে হবে এই রোভারগুলোকে যারা মঙ্গলে মানবজাতির বসতি গঠনের প্রথম দিকে কাজ করছে।
উত্তরমুছুনরেফারেন্সঃ
https://rb.gy/8dspyk
https://rb.gy/pc3unp
https://rb.gy/vrptyc
https://rb.gy/omuisn
উত্তরমুছুনব্লগ থেকে দেখে নিতে পারেনঃ https://rb.gy/g8j2m0
ডক থেকে দেখে নিতে পারেনঃ https://rb.gy/z91mhu